La lecture de cet article est réservée aux abonnés.
Connectez-vous ou abonnez-vous pour y accéder.

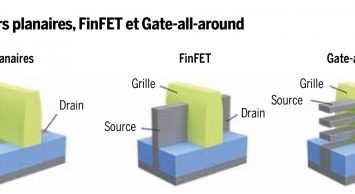
L'AMÉRICAIN EST LE PREMIER À FAIRE LA DEMONSTRATION DE CIRCUITS INTÉGRÉS GRAVES EN PROCESS 2 nm, GRÂCE À UNE TECHNOLOGIE…
ANNONCÉ COMME PLUS ÉCONOMIQUE QUE LES TECHNOLOGIES SIGFOX ET LORA, CE FORMAT DE RÉSEAUX LOCAUX MESH À FAIBLE CONSOMMATION CONVIENT…

UN CONNECTEUR SUR MESURE CONSTITUÉ DE BLOCS ÉLEMENTAIRES (PUISSANCE, SIGNAUX OU DONNÉES) ASSEMBLÉS SUR UN RAIL : C'EST CE QUE…